@inproceedings{lin2019tsm,
title={TSM: Temporal Shift Module for Efficient Video Understanding},
author={Lin, Ji and Gan, Chuang and Han, Song},
booktitle={Proceedings of the IEEE International Conference on Computer Vision},
year={2019}
}
-
TSM is featured by MIT News / MIT Technology Review / WIRED / Engadget / NVIDIA News
-
(09/2020) We update the environment setup for the
online_demo, and should be much easier to set up. Check the folder for a try! -
(01/2020) We have released the pre-trained optical flow model on Kinetics. We believe the pre-trained weight will help the training of two-stream models on other datasets.
-
(10/2019) We scale up the training of the TSM model to 1,536 GPUs, finishing Kinetics pre-training in 15 minutes. See tech report here.
-
(09/2019) We have released the code of online hand gesture recognition on NVIDIA Jeston Nano. It can achieve real-time recognition at only 8 watts. See
online_demofolder for the details. [Full Video]

We release the PyTorch code of the Temporal Shift Module.
- Prerequisites
- Data Preparation
- Code
- Pretrained Models
- Testing
- Training
- Live Demo on NVIDIA Jetson Nano
The code is built with following libraries:
- PyTorch 1.0 or higher
- TensorboardX
- tqdm
- scikit-learn
For video data pre-processing, you may need ffmpeg.
We need to first extract videos into frames for fast reading. Please refer to TSN repo for the detailed guide of data pre-processing.
We have successfully trained on Kinetics, UCF101, HMDB51, Something-Something-V1 and V2, Jester datasets with this codebase. Basically, the processing of video data can be summarized into 3 steps:
- Extract frames from videos (refer to tools/vid2img_kinetics.py for Kinetics example and tools/vid2img_sthv2.py for Something-Something-V2 example)
- Generate annotations needed for dataloader (refer to tools/gen_label_kinetics.py for Kinetics example, tools/gen_label_sthv1.py for Something-Something-V1 example, and tools/gen_label_sthv2.py for Something-Something-V2 example)
- Add the information to ops/dataset_configs.py
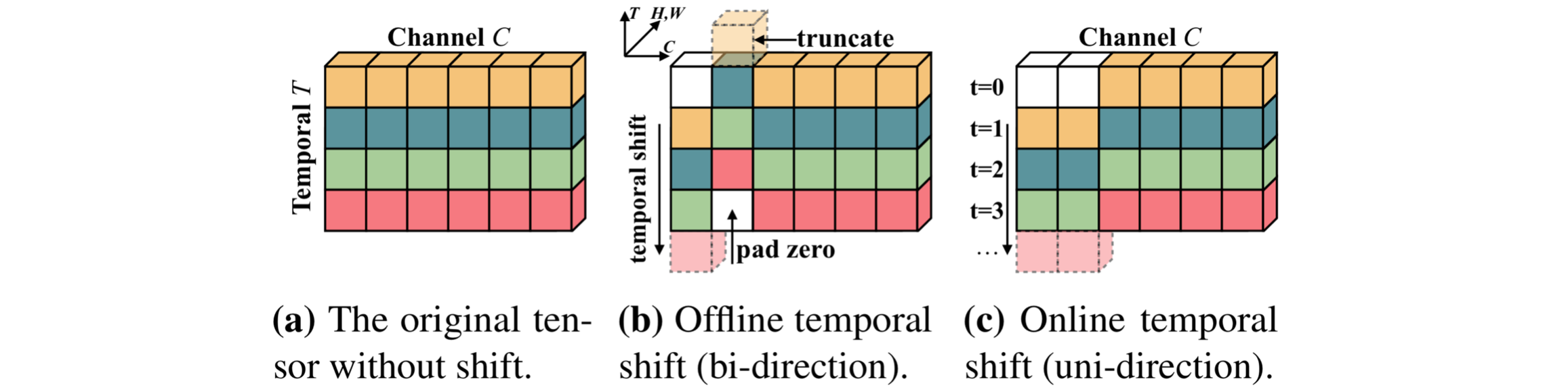
This code is based on the TSN codebase. The core code to implement the Temporal Shift Module is ops/temporal_shift.py. It is a plug-and-play module to enable temporal reasoning, at the cost of zero parameters and zero FLOPs.
Here we provide a naive implementation of TSM. It can be implemented with just several lines of code:
# shape of x: [N, T, C, H, W]
out = torch.zeros_like(x)
fold = c // fold_div
out[:, :-1, :fold] = x[:, 1:, :fold] # shift left
out[:, 1:, fold: 2 * fold] = x[:, :-1, fold: 2 * fold] # shift right
out[:, :, 2 * fold:] = x[:, :, 2 * fold:] # not shift
return outNote that the naive implementation involves large data copying and increases memory consumption during training. It is suggested to use the in-place version of TSM to improve speed (see ops/temporal_shift.py Line 12 for the details.)
Training video models is computationally expensive. Here we provide some of the pretrained models. The accuracy might vary a little bit compared to the paper, since we re-train some of the models.
In the latest version of our paper, we reported the results of TSM trained and tested with I3D dense sampling (Table 1&4, 8-frame and 16-frame), using the same training and testing hyper-parameters as in Non-local Neural Networks paper to directly compare with I3D.
We compare the I3D performance reported in Non-local paper:
| method | n-frame | Kinetics Acc. |
|---|---|---|
| I3D-ResNet50 | 32 * 10clips | 73.3% |
| TSM-ResNet50 | 8 * 10clips | 74.1% |
| I3D-ResNet50 NL | 32 * 10clips | 74.9% |
| TSM-ResNet50 NL | 8 * 10clips | 75.6% |
TSM outperforms I3D under the same dense sampling protocol. NL TSM model also achieves better performance than NL I3D model. Non-local module itself improves the accuracy by 1.5%.
Here is a list of pre-trained models that we provide (see Table 3 of the paper). The accuracy is tested using full resolution setting following here. The list is keeping updating.
| model | n-frame | Kinetics Acc. | checkpoint | test log |
|---|---|---|---|---|
| TSN ResNet50 (2D) | 8 * 10clips | 70.6% | link | link |
| TSM ResNet50 | 8 * 10clips | 74.1% | link | link |
| TSM ResNet50 NL | 8 * 10clips | 75.6% | link | link |
| TSM ResNext101 | 8 * 10clips | 76.3% | TODO | TODO |
| TSM MobileNetV2 | 8 * 10clips | 69.5% | link | link |
We also provide the checkpoints of TSN and TSM models using uniform sampled frames as in Temporal Segment Networks paper, which is more sample efficient and very useful for fine-tuning on other datasets. Our TSM module improves consistently over the TSN baseline.
| model | n-frame | acc (1-crop) | acc (10-crop) | checkpoint | test log |
|---|---|---|---|---|---|
| TSN ResNet50 (2D) | 8 * 1clip | 68.8% | 69.9% | link | link |
| TSM ResNet50 | 8 * 1clip | 71.2% | 72.8% | link | link |
| TSM ResNet50 | 16 * 1clip | 72.6% | 73.7% | link | - |
We provide the optical flow model pre-trained on Kinetics. The model is trained using uniform sampling. We did not carefully tune the training hyper-parameters. Therefore, the model is intended for transfer learning on other datasets but not for performance evaluation.
| model | n-frame | top-1 acc | top-5 acc | checkpoint | test log |
|---|---|---|---|---|---|
| TSM ResNet50 | 8 * 1clip | 55.7% | 79.5% | link | - |
Something-Something V1&V2 datasets are highly temporal-related. TSM achieves state-of-the-art performnace on the datasets: TSM achieves the first place on V1 (50.72% test acc.) and second place on V2 (66.55% test acc.), using just ResNet-50 backbone (as of 09/28/2019).
Here we provide some of the models on the dataset. The accuracy is tested using both efficient setting (center crop * 1clip) and accuate setting (full resolution * 2clip)
| model | n-frame | acc (center crop * 1clip) | acc (full res * 2clip) | checkpoint | test log |
|---|---|---|---|---|---|
| TSM ResNet50 | 8 | 45.6 | 47.2 | link | link1 link2 |
| TSM ResNet50 | 16 | 47.2 | 48.4 | link | link1 link2 |
| TSM ResNet101 | 8 | 46.9 | 48.7 | link | link1 link2 |
On V2 dataset, the accuracy is reported under the accurate setting (full resolution * 2clip).
| model | n-frame | accuracy | checkpoint | test log |
|---|---|---|---|---|
| TSM ResNet50 | 8 * 2clip | 61.2 | link | link |
| TSM ResNet50 | 16 * 2lip | 63.1 | link | link |
| TSM ResNet101 | 8 * 2clip | 63.3 | link | link |
For example, to test the downloaded pretrained models on Kinetics, you can run scripts/test_tsm_kinetics_rgb_8f.sh. The scripts will test both TSN and TSM on 8-frame setting by running:
# test TSN
python test_models.py kinetics \
--weights=pretrained/TSM_kinetics_RGB_resnet50_avg_segment5_e50.pth \
--test_segments=8 --test_crops=1 \
--batch_size=64
# test TSM
python test_models.py kinetics \
--weights=pretrained/TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e50.pth \
--test_segments=8 --test_crops=1 \
--batch_size=64Change to --test_crops=10 for 10-crop evaluation. With the above scripts, you should get around 68.8% and 71.2% results respectively.
To get the Kinetics performance of our dense sampling model under Non-local protocol, run:
# test TSN using non-local testing protocol
python test_models.py kinetics \
--weights=pretrained/TSM_kinetics_RGB_resnet50_avg_segment5_e50.pth \
--test_segments=8 --test_crops=3 \
--batch_size=8 --dense_sample --full_res
# test TSM using non-local testing protocol
python test_models.py kinetics \
--weights=pretrained/TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e100_dense.pth \
--test_segments=8 --test_crops=3 \
--batch_size=8 --dense_sample --full_res
# test NL TSM using non-local testing protocol
python test_models.py kinetics \
--weights=pretrained/TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e100_dense_nl.pth \
--test_segments=8 --test_crops=3 \
--batch_size=8 --dense_sample --full_resYou should get around 70.6%, 74.1%, 75.6% top-1 accuracy, as shown in Table 1.
For the efficient (center crop and 1 clip) and accurate setting (full resolution and 2 clip) on Something-Something, you can try something like this:
# efficient setting: center crop and 1 clip
python test_models.py something \
--weights=pretrained/TSM_something_RGB_resnet50_shift8_blockres_avg_segment8_e45.pth \
--test_segments=8 --batch_size=72 -j 24 --test_crops=1
# accurate setting: full resolution and 2 clips (--twice sample)
python test_models.py something \
--weights=pretrained/TSM_something_RGB_resnet50_shift8_blockres_avg_segment8_e45.pth \
--test_segments=8 --batch_size=72 -j 24 --test_crops=3 --twice_sampleWe provided several examples to train TSM with this repo:
-
To train on Kinetics from ImageNet pretrained models, you can run
scripts/train_tsm_kinetics_rgb_8f.sh, which contains:# You should get TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e50.pth python main.py kinetics RGB \ --arch resnet50 --num_segments 8 \ --gd 20 --lr 0.02 --wd 1e-4 --lr_steps 20 40 --epochs 50 \ --batch-size 128 -j 16 --dropout 0.5 --consensus_type=avg --eval-freq=1 \ --shift --shift_div=8 --shift_place=blockres --npbYou should get
TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e50.pthas downloaded above. Notice that you should scale up the learning rate with batch size. For example, if you use a batch size of 256 you should set learning rate to 0.04. -
After getting the Kinetics pretrained models, we can fine-tune on other datasets using the Kinetics pretrained models. For example, we can fine-tune 8-frame Kinetics pre-trained model on UCF-101 dataset using uniform sampling by running:
python main.py ucf101 RGB \ --arch resnet50 --num_segments 8 \ --gd 20 --lr 0.001 --lr_steps 10 20 --epochs 25 \ --batch-size 64 -j 16 --dropout 0.8 --consensus_type=avg --eval-freq=1 \ --shift --shift_div=8 --shift_place=blockres \ --tune_from=pretrained/TSM_kinetics_RGB_resnet50_shift8_blockres_avg_segment8_e50.pth -
To train on Something-Something dataset (V1&V2), using ImageNet pre-training is usually better:
python main.py something RGB \ --arch resnet50 --num_segments 8 \ --gd 20 --lr 0.01 --lr_steps 20 40 --epochs 50 \ --batch-size 64 -j 16 --dropout 0.5 --consensus_type=avg --eval-freq=1 \ --shift --shift_div=8 --shift_place=blockres --npb
We have build an online hand gesture recognition demo using our TSM. The model is built with MobileNetV2 backbone and trained on Jester dataset.
- Recorded video of the live demo [link]
- Code of the live demo and set up tutorial:
online_demo